

前言
多个螺旋磁性软机器人使我们更加了解集体行为
电磁软机器人是在受限环境中通过外部磁刺激进行无接触控制的一种有前途的选择。磁感应运动(即磁能动性)由机器人的局部变形驱动,从而将粒子排列和交替的极性分布编程到体内。尝试通过直接激光打印(DLP),立体光刻(SLA)和熔丝制造(FDM)结合电磁体的多轴操作,将磁各向异性编程到软机器人中。
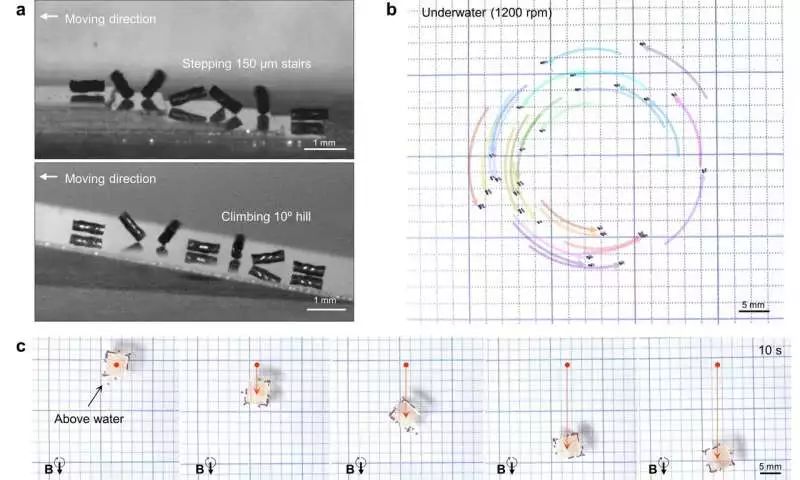
由螺旋磁性软机器人的旋转和旋转运动驱动的分层磁势性允许(a)越过障碍物;(b)多个软机器人的水下游泳;以及(c)通过永磁体的单个旋转轴集体运输货物。图源:仁荷大学
现在,研究人员已经演示了无需电磁调节的磁性软机器人的简便准备和启动方法。他们通过扭曲二维聚合物复合膜构建了三维螺旋软机器人。其热塑性聚氨酯-磁铁矿纳米复合材料由于高伸长率而使薄膜超扭曲;热塑性材料的使用也使扭曲的结构能够热固定。而磁性软机械手的致密螺旋体允许分层的磁势,包括顺时针旋转和逆时针旋转,这是由两个永久磁铁产生的,其中单个旋转轴在基板下方顺时针旋转。
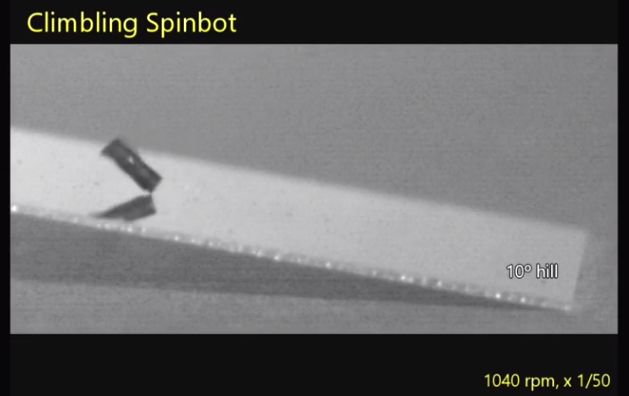
在多个软机器人的磁操纵中,由于每个机器人的各自轨迹同时沿着不同的路径进行协调,因此单个机器人的控制仍然是复杂的操作。这些多磁化软机器人的无电池操作是通过平面内旋转磁体的频率变化来实现的,因为即使采用相同的旋转速度,具有不同纵横比的软机器人也可以通过其他旋转模式(旋转,枢转和翻滚)进行驱动。除了多个软机器人的半径,速度和路径的轨道操纵外,高达60体长s-1的敏捷运动和分层磁动性还帮助软机器人爬上了楼梯等障碍物。
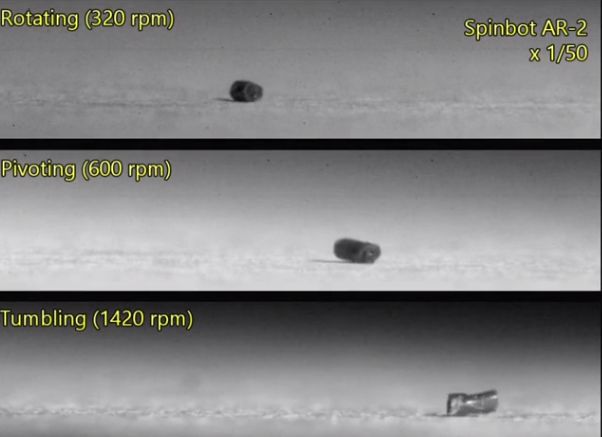
磁旋转速度控制下旋转,枢转和翻滚的三峰旋转的演变;磁性软机器人(例如,旋转机器人)的多功能性扩展到表现出集体行为的多机器人系统。图源:仁荷大学
研究人员还展示了受蚁群货物运输集体质量启发的多个磁性软机器人之间的合作。集体行为是自然界中的常见现象,例如在细胞迁移,蚁群和鱼类群中发现的例子。但是,在集体机器人中很难实现这种设计,因为个人和集体机器人运动的动力学都需要根据计算和实验分析进行优化。这些要求在本研究中变得不必要,因为毛细作用力使旋转和旋转的软机器人附着在货物周围。机器人下方磁体的重新定位导致类似于蚂蚁的工作行为的重物的便利运输。
这些通过分层磁动性按需进行轨道操纵的新颖技术可以扩展到生物医学应用,在这些应用中,小型磁性游泳者可以潜在地将药物输送到结构复杂的空间中。
完
▍来源:网络整理
▍声明:如有侵权,请联系小编删除。
▍公众号:优弘智能
▍今日头条:优弘智能




|
研发中心:重庆市科学技术研究院
制造基地:重庆市潼南工业园 服务热线:400-006-7926 邮箱:sales@uohon.com 版权所有:优弘智能医疗设备(重庆)有限公司 渝ICP备19010222号-1  渝公网安备 50019002501889号 |